热词:
MSTA
科普一下
科普时报
全国科技活动周
微信二维码
微博二维码
APP二维码
切换导航
首页
科普资讯
科普视频
科普大家
科幻世界
校园科普
科普好书
一版
二版
三版
四版
五版
六版
七版
八版
九版
十版
十一版
十二版
十三版
十四版
十五版
十六版
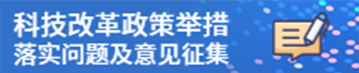
北京市第55个世界地球日主题宣传活动周启动
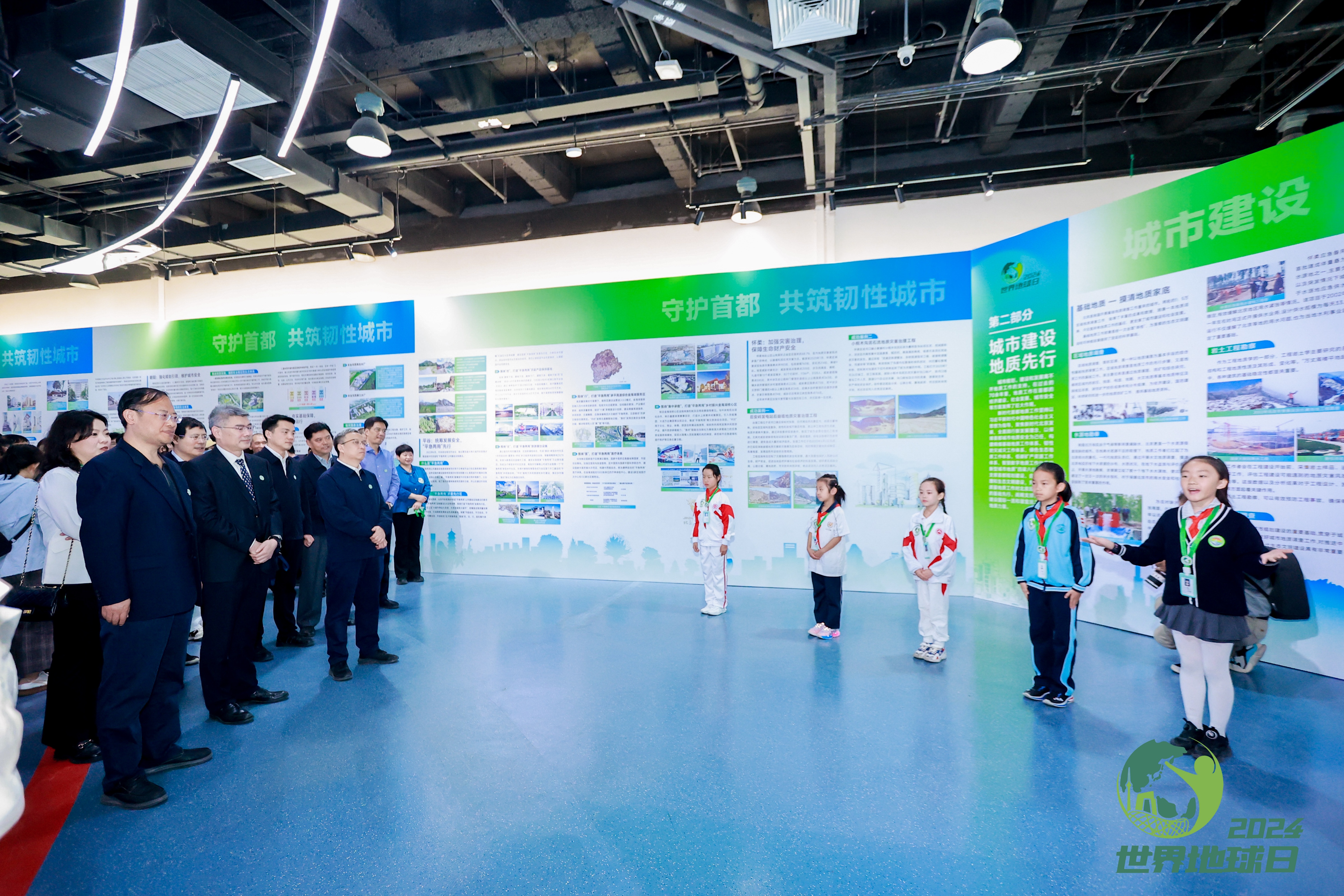
古老森林演化曾启动生物大灭绝按钮
春天,去天坛看“香雪海”
“公园20分钟”能提升幸福感?
赞颂航天员精神,科普巨幕电影《火星使命》首映
【时政】习近平向首届“中国-拉美和加勒比国家航天合作论坛”致贺信
第九个中国航天日,北斗30周年线上“团建”活动来啦
精彩科普活动预告来了!
神十八航天员乘组确定!今天上午11时将与中外媒体见面
专家:久坐不动疾病丛生 坚持运动是良药
科研人员发现石斛新种“姬竹叶石斛”
“科技女生赋能计划”启动,让更多女性在科学界发挥力量
专家学者探讨中小学创新人才培养
科普一下
更多>>
【科普一下】暴风雨时天空为何“一秒变绿”?
【科普一下】高超声速导弹能被拦截吗?
【科普一下】如何判断燃气是否泄漏?
【科普一下】杨柳树为何要标记“性别”?
时政新闻
更多>>
习近平向首届“中国-拉美和加勒比国家航天合作论坛”致贺信
习近平主持召开新时代推动西部大开发座谈会强调 进一步形成大保护大开放高质量发展新格局 奋力谱写西部大开发新篇章
习近平在重庆考察调研
习近平会见德国总理朔尔茨
通知公告
更多>>
>
公示!全国科普工作先进集体和先进工作者拟表彰对象名单
>
关于开展科普微视频征集活动的通知
>
关于试行开展上海市自然科学研究系列科技传播专业高级职称认定工作的通知
.
科普微视频
更多>>
能源碳宝变形记——自然界中的碳循环(2023年全国优秀科普微视频)
地震来了跑不跑?(2023年全国优秀科普微视频)
潮间带(2023年全国优秀科普微视频)
一千克有多重(2023年全国优秀科普微视频)
科学课堂
更多>>
三峡引领号:漂在海上发电的巨型“不倒翁”
大乙烯装置:让乙烯实现中国造
《科普时报》数字报
更多>>
专题
更多>>
国家工程师带你看大国工程
京彩三农 - 助力北京美丽乡村建设
更多>>
每天睡满八小时才是优质睡眠?
低浓度阿托品可以预防近视?人人都能用?
鸡骨泥有毒,不能加到淀粉肠里给人吃?
刚宰杀的畜肉最新鲜?
‹
›
每多做一次CT,患癌风险增加43%?
HPV疫苗没有用?
黄瓜笔直是打药所致?
空调一开一关更省电?
科普
大家
更多 >>
王渝生
科学史家,科普名家,国家教育咨询委员会委员
樽酒慰离颜 把酒话桑麻
《本草纲目》的分类体系
春雨惊春清谷天
周忠和
中国科学院院士,中国科普作家协会理事长
周忠和院士:科学家做科普绝不是不务正业
科普精品怎样“炼”成?周忠和院士提到了这几个方面
周忠和院士谈“为什么还要关注古生物学”
苏 青
中国青少年科技教育工作者协会副理事长兼科学传播工作委员会主任
论坛旗举聚群贤
科普出版呈现四大格局
稚美孺龄欣成就
郭 耕
中国科普作家协会生态专业委员会副主任,北京市生物多样性保护研究中心研究员
灰瓣蹼鹬 来自北冰洋的“稀客”
龙头上为何生鹿角
蹄兔的近亲竟然是大象
单守庆
中国药膳研究会副会长
未来食品迎面而来
二月二吃“龙食”
特殊食品,特殊在哪儿
许焕岗
中国科普作家协会会员
“红狗”竟然是豺
鹦鹉螺不是螺
“大肚王”犀牛不是牛
陈 征
北京交通大学副教授
“天宫课堂”第四课开讲 专家解析小球碰撞背后的大道理
积极参与科普 践行科学报国
科普与科学教育应“同频共振”—— 聚焦《关于加强新时代中小学科学教育工作的意见》(一)
李峥嵘
中国科普作家协会会员,北京市十大金牌阅读推广人
我想活出怎样的人生
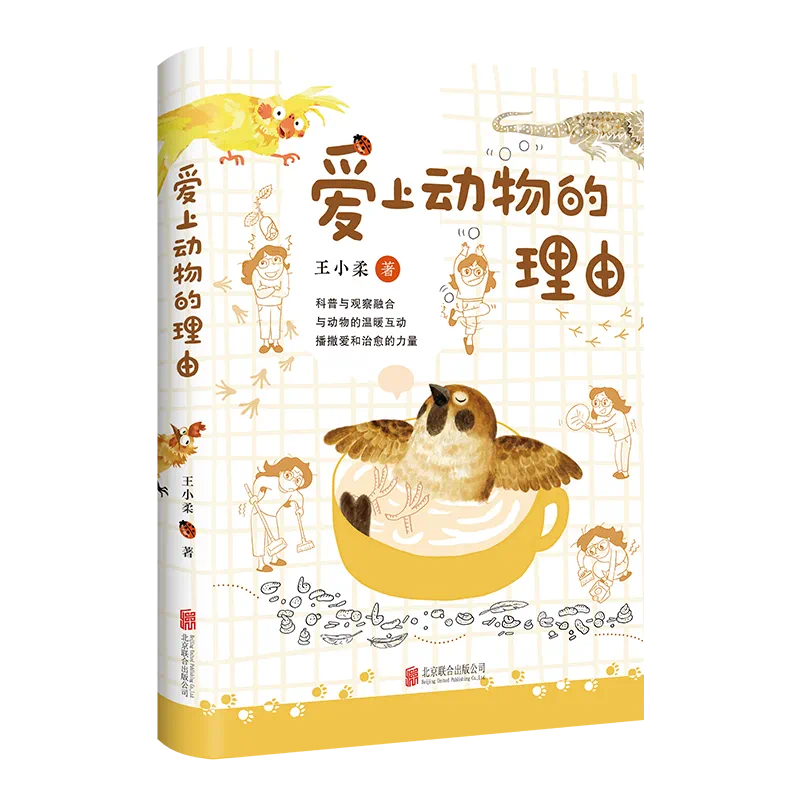
跟着王小柔观察自然
青少年消费要学会避“坑”
王大鹏
中国科普研究所副研究员,中国科普作家协会理事
AI炮制了谣言,科普如何破局
科普如何兼顾科学性与趣味性
跟着科研人员“走进石油”
陈柳岐
中国科普作家协会科普教育专业委员会副秘书长
别因AI工具丧失你的思考力
谨防过度沉迷,给虚拟世界加把“锁”
连接已知与未知的桥梁
周 群
中国科普作家协会会员、北京市特级教师
科普科幻教育将助力创新人才培养 —— 以第十届全国中学生科普科幻作文大赛初赛试题为例
别错过 科普科幻教育“红利”
心动+行动,才能做好科学教育“加法”
祁云枝
研究员,中国科普作家协会会员
油菜花给蜜蜂精心设计“路标”
无患子:植物界的“清洁大师”
天蛾竟是百合花的“媒人”
科幻
世界
更多 >>
科幻嘉年华丨2024中国科幻大会期间活动预告
第二届科幻星球奖冠军揭晓
走近科幻小说《逐日》中的科学家
用科幻手法“翻新”中国历史故事
科幻作品中的“另类”科学家
【书单推荐】看完这五部科幻作品,刷新你的科幻观
第二届“未来战争科幻”征文大赛来啦!
科幻微小说丨被赶出地球的人
‹
›
品牌
活动
科普进社区
更多>>
人类智力超群之谜破解
千万别硬扛,减轻晚期癌痛有办法
这4种面包能量比馒头低
全民关注痛风日:警惕不良饮食习惯带来“第四高”
‹
›
科普进校园
更多>>
世界读书日:“寻找小小翻译家”活动点燃阅读热情
“水中无人系统挑战赛(港澳选拔赛)”初赛及培训活动举行
传承科学家精神,做追光少年
北京高校服务雄安建设校企对接交流活动在雄安新区举办
读书日话“读”“书”
院士科普进校园活动在昆明举行
科普
产业
科普好书
更多>>
长大后的世界什么样?《少年中国科技·未来科学+》新书发布
《李约瑟镜头下的战时中国科学》新书披露千张珍贵照片
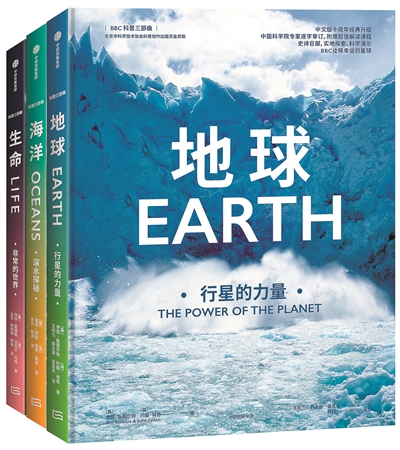
跟着科考队探寻自然
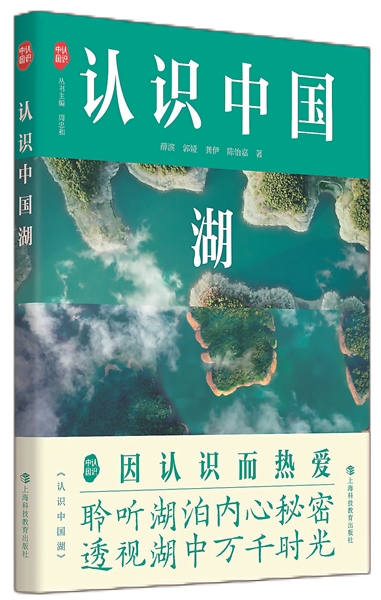
科学与人文“卷”于湖中
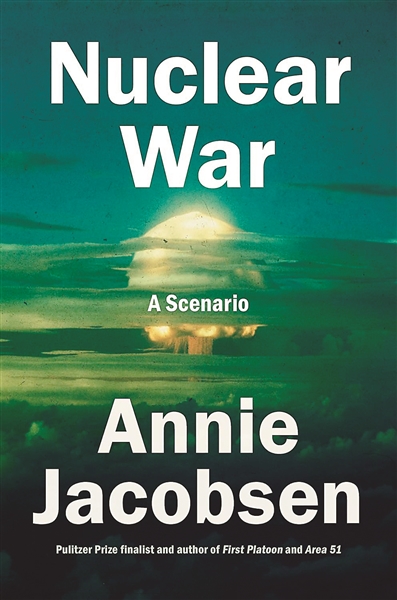
一枚核导弹或将导致人类灭绝
跟着王小柔观察自然
科普基地
更多>>
青山公益在行动,守护大熊猫栖息地
为2000万御窑瓷片“重塑生命”
科普研学
更多>>
运城推出5条研学旅行线路欢迎全国学子
赏樱观海、踏青研学……青岛运游融合助力“春日经济”升温
2024年现代科技馆体系联合行动全面启动
守护“心”健康 —— 全国社会心理服务体系建设观察
‹
›
友情链接
中国政府网
中国科学技术部
中国科学技术协会
中国科学院
中国工程院
学习强国
科技日报社
科普时报社
全国科技活动周
青少年科普库
北京市科委
北京市科协
人民网
新华网
光明网
中国经济网
中国军网
中国科技网
中国高新网
中国科技资讯库
科普中国
科普一下
北京市农业农村局
MSTA科技讲座
全国科普微视频大赛
全国科普讲解大赛
科普沙龙
中国科普作家网
中国科普研究所
中国数字科技馆
中国科普博览
科学普及出版社
核能云端博物馆
关于我们
法律声明
联系我们
人才招聘
注册协议
投稿须知
咨询与建议
政府网站年度工作报表
TEL:010-58884104
E-Mail:kepu@kepu.gov.cn
如果您有任何意见或建议,请联系我们!
京ICP备05022684号-3
政府网站标识码:bm06000004
支持
IPv6
网络
版权所有:中国科普网